【共同研究成果】「巧みな手の動き」の主役は脊髄だった ― 随意運動制御における脊髄反射回路の役割を、神経細胞の働きとして実証 ―
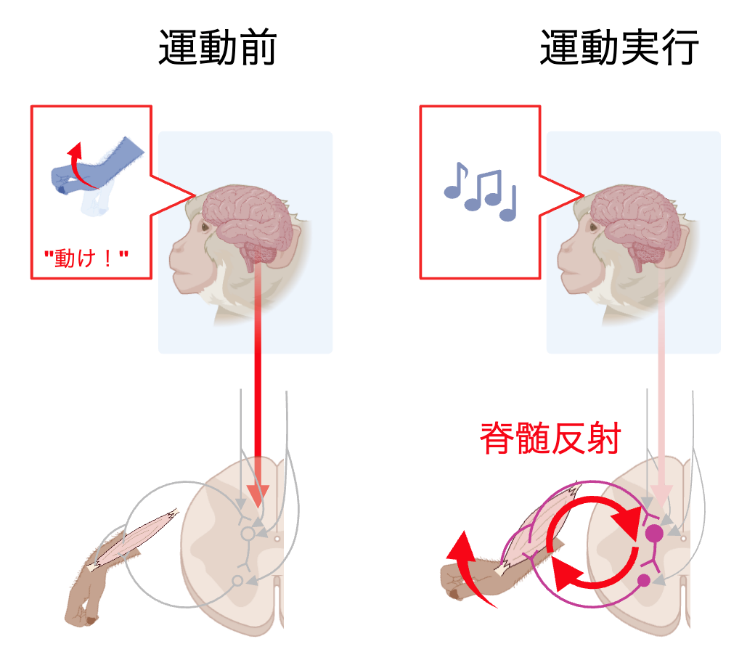
つまり、実際に運動するときに見える筋活動(振幅・持続時間)は、運動前の「計画段階」で、脊髄回路のフィードバックの強さ(ゲイン*2)があらかじめ設定(概要図-①)され、実際の運動は脊髄反射が実行している(概要図-②)ことを示唆しています。これらの成果は、「巧みな手の動きは大脳皮質が中心」という従来の見方に対し、脊髄反射回路が皮質機構と並列に働き、随意運動を支えるという新しい枠組みを提示するものです。
本研究成果は、『米国科学アカデミー紀要』(PNAS/Proceedings of the National Academy of Sciences of the USA)に【2026年3月19日】に掲載されました。
1.研究の背景
霊長類の巧緻な手の運動(skillful hand movement)は、道具操作や精密な作業など、人間の行動を特徴づける重要な能力です。この能力は、大脳皮質(とくに運動野)による精密な運動指令と学習により成立すると考えられてきました。一方で、脊髄には、筋や腱などからの固有感覚*3入力に応じて運動出力を調整する多様な反射回路が存在します。しかし、こうした脊髄反射回路が、霊長類の随意運動の最中にどの程度“能動的に”運動を作り出しているのか、そしてその仕組みを神経細胞(単一ニューロン)レベルで明確に示した研究はほとんどありませんでした。
そこで本研究では、随意運動中の脊髄介在ニューロン*4を直接記録し、反射回路がどのように筋活動と結びついて働くのかを、実験と計算機シミュレーションを組み合わせて検証しました。
2. 研究の概要
研究グループは、サルに手関節の随意運動課題を学習させ、課題遂行中に頸髄から脊髄介在ニューロン活動を記録しました。特に本研究では、脊髄介在ニューロンを「入力」と「出力」の両面から同定した点が特徴です。
まず、手関節伸筋に由来する固有感覚(Group I)を含む末梢神経を電気刺激し、短潜時で応答するニューロンを抽出することで、求心性入力側の特性を同定しました。次に、スパイクトリガ平均(Spike-triggered averaging; STA)を用いて、記録したニューロンの発火がどの筋の筋活動(EMG)に促通効果を持つかを推定し、遠心性出力側の結合を評価しました。これにより、同じ“主働筋(agonist)”由来の固有感覚入力を受け、同じ主働筋を促通する興奮性脊髄介在ニューロン群を同定しました。
さらに、
① 筋活動から神経発火を予測する解析(デコーディング)
② 神経発火から筋活動を再現する解析(筋電図再構成)
を用いて、神経活動と筋活動が随意運動中に相互に結びつき、閉ループとして働くことを検証しました。そのうえで、既存の脊髄反射モデルを基盤とする計算機シミュレーションを行い、観測された筋活動の形を説明する主要パラメータとして、「力フィードバックの利得(ゲイン)」の役割を評価しました。
3. 研究成果
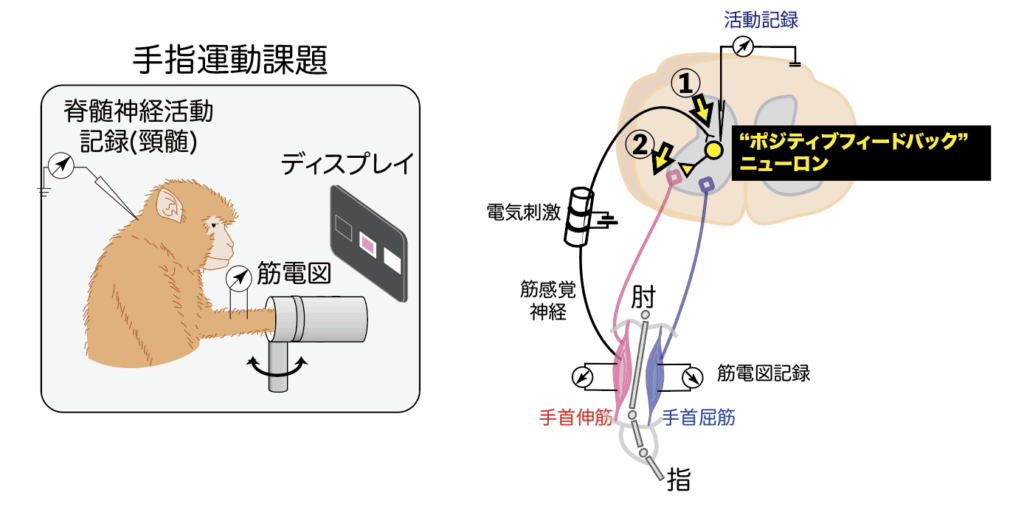
1)運動中の霊長類において、脊髄反射を中継する介在ニューロン「ポジティブフィードバックニューロン」*5の同定に成功(図1)
サルに手首の動きに応じて報酬(リンゴジュース)を与えるゲームを行わせ、その際の脊髄介在ニューロンの活動を、外科的手術によって取り付けた記録用チェインバーを用いて記録する実験方法を開発しました(図1左)。また、手首の伸筋の筋腱固有感覚(Group I)を含む末梢神経を電気刺激することによって、介在ニューロンへの感覚入力と、活動電位と手首伸筋筋活動との関係から介在ニューロンの伸筋への出力をそれぞれ同定する技術を開発しました(図1右)。これによって、運動中の霊長類において、固有感覚を伝える脊髄反射を中継する介在ニューロンを初めて同定しました。記録された大半の介在ニューロンは、伸筋から感覚入力を受けて、同じ伸筋を興奮させる特徴を持つ「ポジティブフィードバックニューロン」でした。
2)ポジティブフィードバックニューロンは、手首の伸展時に大きな活動を示す(図2)
ポジティブフィードバックニューロンの手首屈曲伸展運動中の活動を比較すると(図2左)、手首伸展時に有意に高い活動頻度を示していました(図2右)。このことは、このニューロンの活動が、固有感覚入力を受けて、伸筋の活動の増加に使われている可能性を示していました。

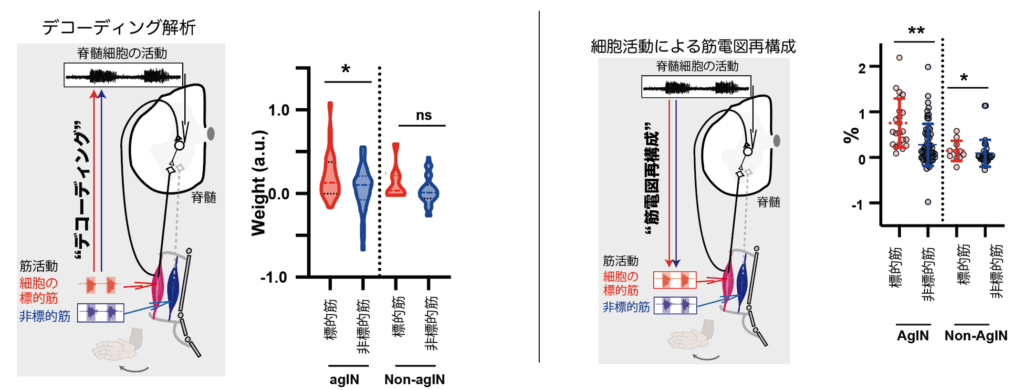
3)ポジティブフィードバックニューロンの活動は筋感覚入力によって作られ、その活動は同じ筋肉の活動を生むことを証明(図3)
ポジティブフィードバックニューロンの活動パターンは、そのニューロンの支配する筋活動によってより高く推定(デコーディング)することができ(図3左)、また個々のニューロンの活動によって同じ筋肉の活動をより高い貢献度で再構成できることが分かりました(図3右)。これらから、ポジティブフィードバックニューロンは同じ筋から入力を受け、同じ筋に出力するという回路特徴を持つだけでなく、実際の運動時にそれらの筋活動を作り出している事が証明されました。
4)ポジティブフィードバックニューロン(AgIN)は筋肉のセンサー(筋紡錘(Ia))でなく、腱のセンサー(ゴルジ腱器官(Ib))からの感覚入力を起点としている可能性が、コンピューターシミュレーションの結果、明らかになった。
脊髄反射の機能を調べるために使われているシミュレーション方法を用いて、腱感覚、筋感覚、脳からの入力をそれぞれ変化させた際の筋電図への影響を調べました。その結果、腱感覚を上下した時のみ、筋電図の大きさをコントロールできることがわかりました。このことは、随意運動時の筋活動が腱からの感覚入力を起点としたポジティブフィードバック回路によって作り出されていることを示していました。
4. 本研究の意義
本研究の重要性は、脊髄反射回路が霊長類の随意運動制御に実際に関与することを、神経細胞の働きとして実証した点にあります。従来、巧緻運動の主役は大脳皮質であると考えられてきましたが、本研究は、脊髄反射回路が皮質機構と並列に働き、運動の計画・実行を支えることを明確に示しました。これは、巧緻運動の理解を一段深めるだけでなく、運動麻痺からの回復やリハビリテーション戦略において、脊髄回路のゲイン制御という新しい介入・評価の視点を提供します。
5. 今後の展望
今後は、上位中枢(大脳皮質など)がどの経路を介し、どのような神経機構によって脊髄反射回路のゲインを設定しているのかを、より詳細に解明します。あわせて、学習や熟達の過程、あるいは損傷後の回復過程において、このゲイン設定がどのように変化し、巧緻運動の獲得や再獲得にどの程度寄与するのかを明らかにします。さらに、脊髄回路のゲインを適切に調整することで巧緻運動の回復を促進できるかどうかについても、基礎研究の知見を臨床へ橋渡しする観点から検討していきます。
■用語解説
*1 脊髄反射回路:筋や腱などからの感覚入力(固有感覚)を受け、脊髄内の神経回路を介して運動出力を調整する回路です。
*2 ゲイン(利得):入力に対する出力の増幅率のような性質で、本研究では筋活動の振幅や持続時間を左右する回路パラメータとして扱っています。
*3 固有感覚:筋や腱の状態(長さや張力など)を脳・脊髄へ伝える感覚です。
*4 脊髄介在ニューロン:脊髄内で感覚入力と運動ニューロンをつなぎ、反射回路の中核を担う神経細胞です。
*5 ポジティブフィードバックニューロン:筋活動が感覚入力を生み、その入力が回路を介して同じ筋活動を増強しうる循環構造(ポジティブフィードバック)を中継するニューロンです。
■原論文情報
- 論文名: Autogenic spinal excitatory circuit ensures skilled hand movements in primates
- 著者: 金祉希*、戸松彩花*、梅田達也、武井智彦、舩戸徹郎、関和彦(*共同筆頭)
- 掲載誌: PNAS(Proceedings of the National Academy of Sciences of the USA)
- DOI: 10.1073/pnas.2525051123
- URL: https://doi.org/10.1073/pnas.2525051123
■助成金
本成果は、主に以下の研究助成を受けて行われました。
- 文部科学省科学研究費助成金: 26120003, 26250013, 15K21754, 19H05724, 19H01092, 23H05488, 946 24K21313
- 日本医療研究開発機構: JP24gm0010009
- 国際共同研究プログラムに基づく日米連携による脳情報通信研究: 22102
本件に関するお問い合わせ先
学校法人玉川学園 教育情報・企画部広報課
- 住所
- 東京都町田市玉川学園6-1-1
- TEL
- 042-739-8710
- FAX
- 042-739-8723
- pr@tamagawa.ac.jp