【中部大学】運動の学習を実現する人工小脳デバイスを開発—ロボットの制御や人の運動制御能力増強・改善への活用に期待—
運動学習を模倣できる人工小脳を開発。
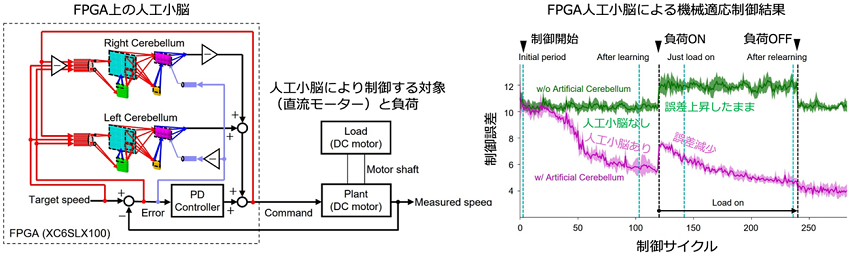
小型・低消費電力の集積回路FPGAに実装し機械制御を確認。
ロボット制御や人間機能拡張技術への応用に期待。
2.発表概要
研究成果は神経科学の専門誌Frontiers in Neuroscience(電子版)に掲載された。
3.論文の情報
雑誌名:Frontiers in Neuroscience
論文タイトル:Artificial cerebellum on FPGA: Realistic real-time cerebellar spiking neural network model capable of real-world adaptive motor control
著者:Yusuke Shinji、Hirotsugu Okuno、 Yutaka Hirata
DOI: 10.3389/fnins.2024.1220908
URL:https://www.frontiersin.org/journals/neuroscience/articles/10.3389/fnins.2024.1220908/abstract
4.用語説明
注1) 運動学習
新たな運動技能を獲得する過程のこと。運動学習では知覚と運動との相互作用が運動制御の視点から重視されている。リハビリテーション医療においては、運動機能回復と訓練との関連を運動学習によって説明する試みもある。運動学習には練習または経験により引き起こされる小脳内の神経細胞間の情報伝達の変化が重要な役割を果たしていると考えられている。その工学的実現により、ロボットの適応制御などへ応用することが期待されている。
注2) FPGA
Field-Programmable Gate Arrayの略。電子素子の設計者が作業現場(Field)で論理回路の書き換えが可能な大規模集積回路(LSI)。最初は家電やネットワーク機器、高速取引システムなどに使われていたが、最近はデータセンターなどの高速化・省電力化でも注目されている。
5.お問い合わせ先
【研究内容について】
平田豊 中部大学 理工学部 AIロボティクス学科 教授
電子メール yutaka@isc.chubu.ac.jp
本件に関するお問い合わせ先
中部大学 学園広報部広報課
- TEL
- 0568-51-7638
- cuinfo@office.chubu.ac.jp